
Продукция
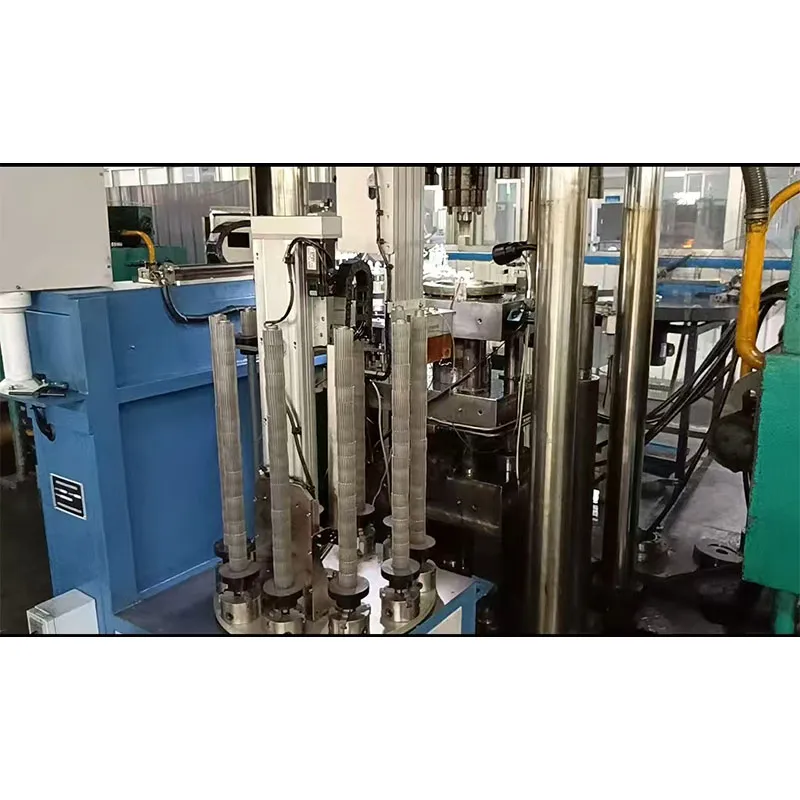






Роботизированная загрузка и разгрузка для ЧПУ
Ключевая цель: Замена ручного труда для выполнения автоматической загрузки заготовок в обрабатывающий центр с ЧПУ, автоматической разгрузки обработанных деталей и аккуратного складирования готовой продукции.
Описание
маркер
Общее описание системы
Ключевая цель: Замена ручного труда для выполнения автоматической загрузки заготовок в обрабатывающий центр с ЧПУ, автоматической разгрузки обработанных деталей и аккуратного складирования готовой продукции.
Основные компоненты
1. Шестиосевой промышленный робот: Исполнительный механизм системы. Его шесть степеней свободы обеспечивают высокую гибкость, позволяя имитировать движения человеческой руки для выполнения операций захвата, перемещения и укладки в сложном пространстве.
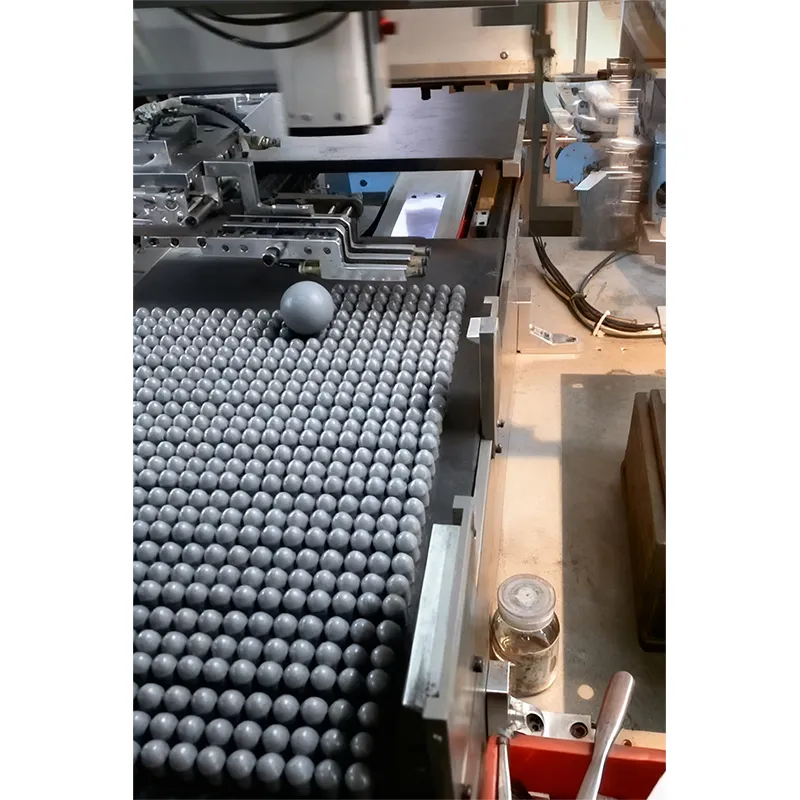
2. Роботизированный захват (Приспособление): Изготавливается на заказ в зависимости от формы и характеристик обрабатываемой детали. Обычно использует пневматический или электрический привод и может включать различные методы, такие как зажим, вакуумный захват и другие.
3. Система машинного зрения: «Глаза» системы. Обычно включает в себя промышленную камеру, объектив, источник освещения и программное обеспечение для обработки изображений.
4. Обрабатывающий центр с ЧПУ: Обслуживаемый объект, на котором производится фактическая механическая обработка.
5. Платформа загрузки/разгрузки: Включает накопитель для заготовок (детали, подлежащие обработке) и накопитель для готовой продукции (обработанные детали) или зону паллетирования.
6. Система управления: «Мозг» системы. Обычно состоит из ПЛК (программируемого логического контроллера) и контроллера робота, координирующих действия всех компонентов: робота, системы зрения, станка и других.
Замкнутый полный рабочий процесс
1. Запуск системы: Все устройства готовы, накопитель заготовок заполнен.
2. Цикл загрузки:
Робот захватывает заготовку из накопителя заготовок.
Перемещается к позиции контроля системой машинного зрения для распознавания ориентации и позиционирования.
Робот корректирует положение и захватывает «ориентированную» заготовку.
Перемещается к станку с ЧПУ, открывает защитную дверь и точно устанавливает заготовку в зажимное приспособление станка.
Робот отходит, дверь станка закрывается, станок начинает обработку.
3. Цикл разгрузки (выполняется параллельно или попеременно с загрузкой):
Робот получает сигнал о завершении обработки от станка.
Открывает дверь станка, извлекает обработанную деталь.
При необходимости выполняет очистку или контроль.
В соответствии с программой паллетирования размещает готовое изделие в заданном месте на поддоне.
4. Непрерывный цикл: Робот постоянно повторяет операции загрузки и разгрузки, формируя эффективный, непрерывный производственный контур.
связаться с нами
Сопутствующие популярные продукты

Автоматическая загрузка и разгрузка печи для порошковой металлургии
Система автоматической загрузки и разгрузки печи для порошковой металлургии, благодаря глубокой интеграции робототехники, машинного зрения и интеллектуального управления, больше не является простым «транспортным» инструментом.

Машина для контроля конусности
Оборудование интегрирует высокоточное измерение, интеллектуальное распознавание и автоматическую сортировку, обеспечивая эффективный контроль качества без пропуска дефектов.

Полуавтоматическая ориентационная машина
Для точного охвата диверсифицированной рыночной конъюнктуры наша компания представляет новую упрощенную модель ориентационной машины. В концепции дизайна данного продукта был сделан точный баланс.
Оборудование для загрузки и разгрузки при правке в порошковой металлургии
Оборудование для автоматической загрузки и разгрузки при правке в порошковой металлургии представляет собой высокотехнологичную автоматизированную систему, интегрирующую прецизионную робототехнику, машинное зрение, технологическую обработку (пропитку маслом) и интеллектуальное управление.

Ориентационная машина-2
Для точного соответствия разнообразным потребностям клиентов мы внедрили гибкую стратегию диверсификации в базовой конструкции формовочного автомата.

Ориентационная машина для постоянных магнитных колец
Ориентационная машина для постоянных магнитных колец представляет собой высокоэффективную полностью автоматизированную производственную линию, реализующую безлюдную обработку от прессования до упорядоченной ориентации.
Загрузка и разгрузка в штамповочной отрасли
Ключевая цель: Замена ручного труда для автоматической, быстрой и точной подачи листовых заготовок или полуфабрикатов в штамп пресса для листовой штамповки, а также для извлечения штампованных деталей и их аккуратного укладывания.
.webp)
Производственная линия порошковой металлургии
Все начинается с этапа прессования. Полностью автоматический порошковый пресс является отправной точкой; манипулятор или конвейерная лента точно заполняет матрицу порошком до постоянного веса.

Портальная загрузка и разгрузка для ЧПУ
Систему портальной загрузки/разгрузки для ЧПУ можно представить как «интеллектуальный мостовой кран», осуществляющий точное движение в трехмерной декартовой системе координат (X, Y, Z).

Сборочная линия электронной промышленности
Сборочная линия электронной промышленности может быть охарактеризована как высокоинтегрированная система «четыре в одном»
Ориентационная машина для промышленной керамики
Забор заготовки роботом: Самоприспосабливающаяся вакуумная присоска бережно извлекает сырую заготовку из пресса.

Ориентационная машина для порошковой металлургии
формовочно-сортировочная машина для порошковой металлургии эволюционировала от простого «подъемно-транспортного» устройства до комплексной автоматизированной рабочей станции, интегрирующей прецизионных роботов, машинное зрение, высокоточные датчики, интеллектуальное управление и технологии удаления пыли.

Ориентационная машина для керамических фильтров
Для точного обслуживания обработки высокоценных, хрупких сырых заготовок керамических фильтров 5G после прессования наша компания представляет специализированную полностью автоматическую ориентационную машину.

Маркировка торца шестерен
Данная полностью автоматическая система специально разработана для удаления заусенцев с внутреннего отверстия шестерни и контроля точности, интегрируя в себя подачу, обработку и контроль.
Специализированная сборочная машина
Данное оборудование интегрирует множество функций в единую систему, обеспечивая бесперебойный процесс от подачи отдельных деталей до выхода готового изделия, значительно повышая производственную эффективность и стабильность качества продукции.

Многофункциональная интегрированная ориентационная машина
Ориентационная машина, интегрирующая функции автоматического взвешивания, измерения размеров и удаления пыли, является ключевым узлом современной интеллектуальной производственной линии.



