
Блок автоматического управления с промышленным компьютером и микроконтроллером
Когда слышишь про блок автоматического управления с промышленным компьютером и микроконтроллером, многие сразу представляют что-то вроде готовой коробки с кнопками. На деле же — это часто набор проблем, которые приходится решать на ходу. В нашей работе с промышленным компьютером и микроконтроллером постоянно сталкиваешься с тем, что теория расходится с практикой. Например, в проектах для ООО Наньцзин Жуцянь Автоматизированное Оборудование мы изначально думали, что связка IPC + MCU — это просто. Оказалось, что синхронизация шин данных требует тонкой настройки, иначе в линиях сборки двигателей возникают задержки, которые не видны в симуляциях.
Почему именно промышленный компьютер и микроконтроллер?
Если брать чисто микроконтроллер — это дёшево, но для сложных алгоритмов, например, в системах контроля качества на конвейере, не хватает вычислительной мощности. Промышленный компьютер один — надёжен, но избыточен для простых задач вроде управления клапанами. Комбинация же позволяет распределить задачи: микроконтроллер обрабатывает сигналы с датчиков в реальном времени, а IPC ведёт логи и связь с SCADA. В одном из проектов для https://www.rq-automation.ru мы как раз использовали такой подход для линии сборки электронных компонентов — микроконтроллер STM32 отвечал за опрос энкодеров, а промышленный компьютер на базе Intel обрабатывал статистику.
Но не всё так гладко. Например, при интеграции в старые цеха возникали проблемы с электромагнитными помехами. Пришлось экранировать линии связи между IPC и MCU, иначе данные искажались. Это та деталь, которую редко учитывают в спецификациях, но на практике она критична. Мы в ООО Наньцзин Жуцянь Автоматизированное Оборудование даже разработали свой протокол валидации сигналов для таких случаев.
Ещё момент — выбор ОС. Для IPC часто берут Linux, но если нужна жёсткая реальность времени, то тут либо RT-патчи, либо отдельный микроконтроллер с FreeRTOS. В проекте для пищевого производства мы попробовали обойтись без MCU, используя только IPC с Xenomai, но столкнулись с задержками при пиковых нагрузках. Вернулись к схеме с двумя компонентами — и всё заработало стабильно.
Особенности проектирования блоков автоматического управления
При компоновке блока автоматического управления важно не только железо, но и разводка. Например, шины питания для IPC и MCU лучше разделять, чтобы скачки от силовой части не влияли на логику. В одном случае мы сэкономили на этом — и получили случайные сбросы контроллера при запуске двигателей. Пришлось перекладывать всю схему питания.
Тепловыделение — ещё одна частая проблема. Промышленные компьютеры греются, и если поставить их в один бокс с микроконтроллерами без вентиляции, то нагрев сокращает срок жизни компонентов. Мы встраиваем датчики температуры прямо на плату и выводим данные в мониторинг — это позволяет предупредить сбои.
Из мелочей — разъёмы. Казалось бы, мелочь, но на виброустановках бывают случаи, когда контакты расшатываются. Мы перешли на разъёмы с фиксаторами после инцидента на заводе, где из-за вибрации отключился модуль управления, и линия встала на 3 часа.
Программная часть: от прошивки до визуализации
Для микроконтроллера пишем обычно на С, но важно учитывать, что код должен быть модульным. В проектах для ООО Наньцзин Жуцянь Автоматизированное Оборудование мы разделяем логику обработки сигналов и коммуникации с IPC. Например, для промышленного компьютера используем Python или C# для сбора данных, а MCU в это время работает с АЦП.
Ошибка, которую многие повторяют — пытаться всё уместить в одну прошивку. Мы тоже так делали в начале, но потом перешли на разделение: микроконтроллер — для реального времени, IPC — для сетевых задач и интерфейсов. Это упрощает отладку и обновления.
Связь между ними чаще всего по Modbus RTU или TCP. Но если линия длинная, то RTU с преобразователем RS-485 надёжнее. В одном из решений для https://www.rq-automation.ru мы использовали именно такой вариант — Modbus RTU между IPC и MCU, а уже IPC отдавал данные по Ethernet в цеховую сеть.
Примеры из практики и неудачи
Был проект, где мы решили использовать готовый блок автоматического управления от стороннего производителя. Сэкономили время, но в итоге столкнулись с несовместимостью драйверов. Пришлось переписывать часть кода под наш IPC. Вывод — даже готовые решения требуют адаптации.
Другой случай — на испытаниях линии для упаковки MCU не успевал обрабатывать данные с фотоэлектрических датчиков. Оказалось, проблема в прерываниях — их приоритеты были настроены неверно. Исправили в прошивке, но на поиск ушло два дня.
Из успешного — внедрение системы на заводе по производству автокомпонентов. Там промышленный компьютер собирал данные с нескольких MCU, что позволило реализовать прогнозирование износа оборудования. Система работает уже больше года, сбоев по вине управления не было.
Интеграция с производственными линиями
При интеграции блока автоматического управления в существующие линии важно учитывать протоколы обмена. Например, старые ПЛК могут работать только по Profibus, тогда нужны шлюзы. Мы в ООО Наньцзин Жуцянь Автоматизированное Оборудование часто используем преобразователи Profibus-Ethernet, чтобы IPC мог читать данные.
Ещё нюанс — масштабирование. Если линия расширяется, то блок должен позволять добавлять новые модули без остановки. Мы закладываем резервные порты и мощности IPC с запасом 20-30%.
Визуализация — часто её недооценивают. Но оператору нужен понятный интерфейс, где видны статусы всех MCU. Мы делаем веб-интерфейсы на IPC, чтобы можно было мониторить систему с любого цехового терминала.
Перспективы и что стоит учитывать
Сейчас всё чаще говорят про IIoT, и здесь связка IPC + MCU идеальна. Микроконтроллер собирает данные, IPC — отправляет в облако. Но нужно помнить про безопасность — мы добавляем шифрование на уровне IPC, чтобы исключить утечки.
Ещё тренд — использование RISC-V в MCU. Пока это экзотика, но мы уже тестируем такие платы. Они дешевле и энергоэффективнее, но пока нет готовых решений для промышленности.
В целом, блок автоматического управления с промышленным компьютером и микроконтроллером — это не готовая коробка, а гибкий инструмент. Главное — не бояться адаптировать его под конкретные задачи, как мы делаем в проектах для https://www.rq-automation.ru. Ошибки будут, но именно они позволяют находить оптимальные решения.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Калибр-пробка для шестерен
Калибр-пробка для шестерен -
 Роботизированная загрузка и разгрузка для ЧПУ
Роботизированная загрузка и разгрузка для ЧПУ -
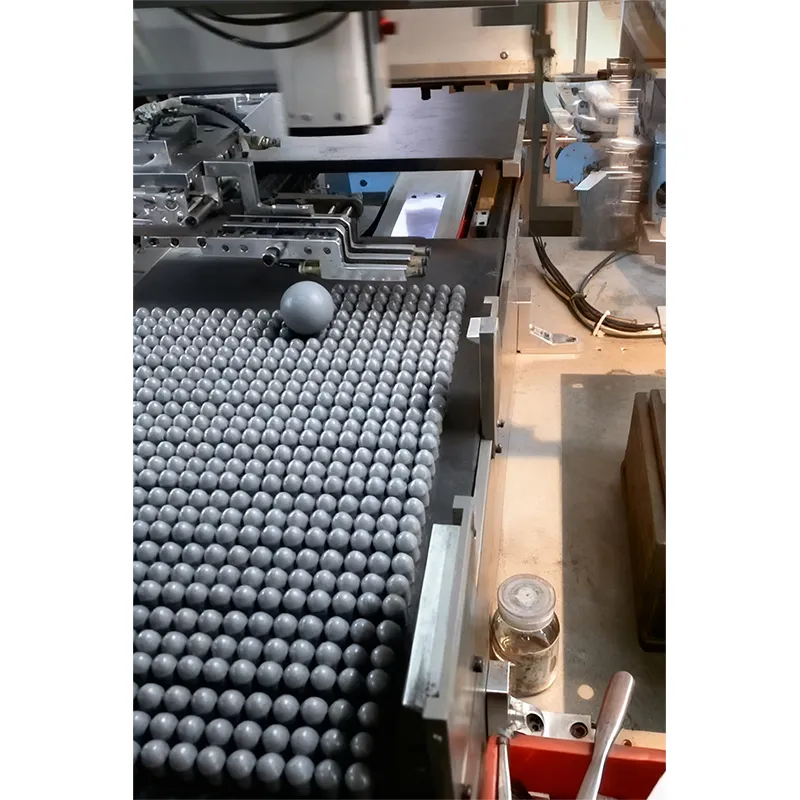
 Ориентационная машина для промышленной керамики
Ориентационная машина для промышленной керамики -
 Ориентационная машина для твердых сплавов
Ориентационная машина для твердых сплавов -
 Автоматическая загрузка и разгрузка печи для порошковой металлургии
Автоматическая загрузка и разгрузка печи для порошковой металлургии -
 Полуавтоматическая ориентационная машина
Полуавтоматическая ориентационная машина -
 Многофункциональная интегрированная ориентационная машина
Многофункциональная интегрированная ориентационная машина -
 Ориентационная машина для постоянных магнитных колец
Ориентационная машина для постоянных магнитных колец -
 Маркировка торца шестерен
Маркировка торца шестерен -
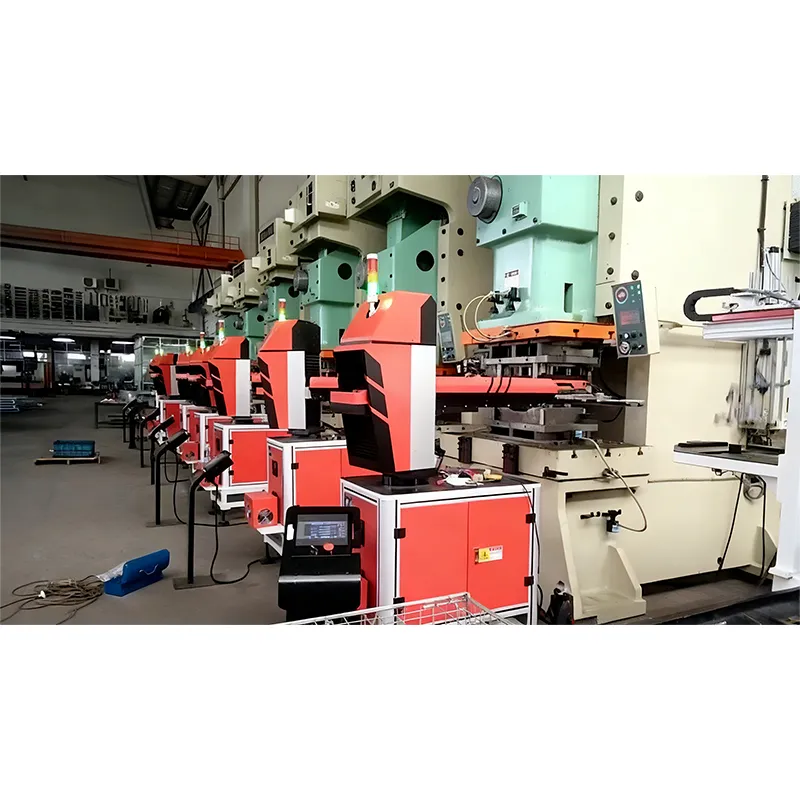 Загрузка и разгрузка в штамповочной отрасли
Загрузка и разгрузка в штамповочной отрасли -
.webp) Производственная линия порошковой металлургии
Производственная линия порошковой металлургии -
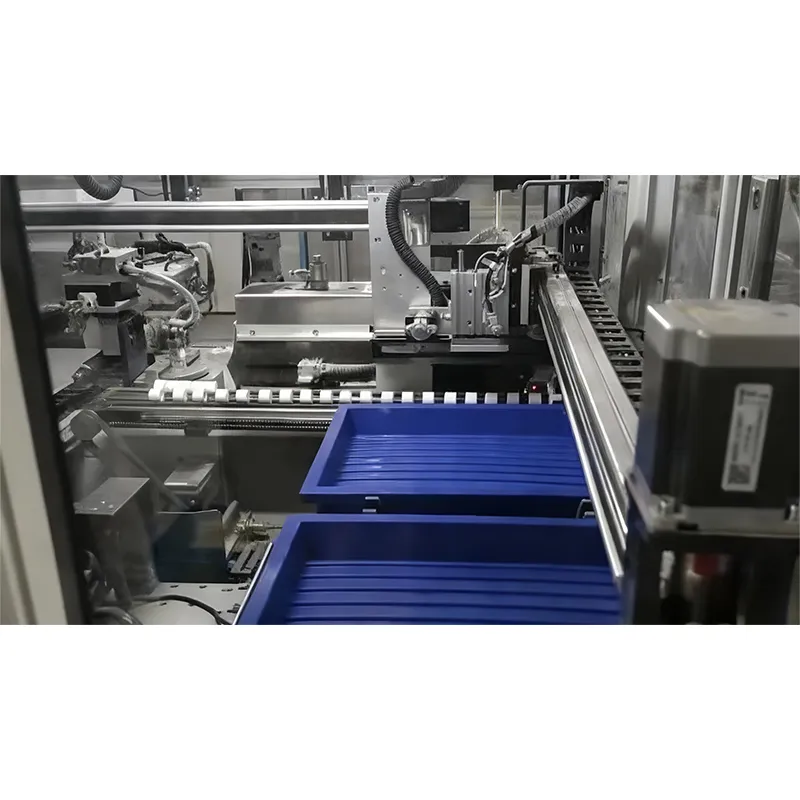
 Сборочная линия электронной промышленности
Сборочная линия электронной промышленности
Связанный поиск
Связанный поиск- Модернизация автоматизации печей для магнитных материалов
- Логистическое решение с agv/amr автономными мобильными роботами
- Визуальный контроль продукции
- Автоматический формовочный пресс для порошковой металлургии
- Автоматизированное оборудование для ocr-распознавания с промышленной камерой и источником освещения для машинного зрения
- Зубофасочный станок
- Полная интеграция автоматизации линий с agv/amr для складской логистики
- Автоматический размерно-контрольный станок
- Оборудование для цифрового логистического паллетирования с китайским частотным преобразователем
- Оборудование для автоматической сортировки



