
Оборудование для повторного позиционирования с редуктором и оптическим датчиком
Когда слышишь про оборудование для повторного позиционирования, первое, что приходит в голову — банальный сервопривод с энкодером. Но если копнуть глубже, особенно в связке с редуктором и оптическим датчиком, начинаются те самые подводные камни, о которых не расскажут на выставках. Многие почему-то считают, что достаточно взять дорогой редуктор — и точность будет идеальной. На практике же именно мелочи вроде термокомпенсации оптики или люфта в шестернях после 10 000 циклов определяют, будет ли система стабильно работать или превратится в головную боль.
Почему редуктор — это не просто ?коробка передач?
В наших проектах для ООО Наньцзин Жуцянь Автоматизированное Оборудование мы изначально использовали стандартные планетарные редукторы. Логика была простой: высокий КПД, минимальный backlash. Но в системах с многократным позиционированием на скоростях выше 3000 об/мин начались проблемы — нагрев изменял геометрию зубьев, и точность падала на 0.05 мм уже после двух часов непрерывной работы. Пришлось переходить на гибридные решения с принудительным охлаждением, хотя изначально казалось, что это избыточно.
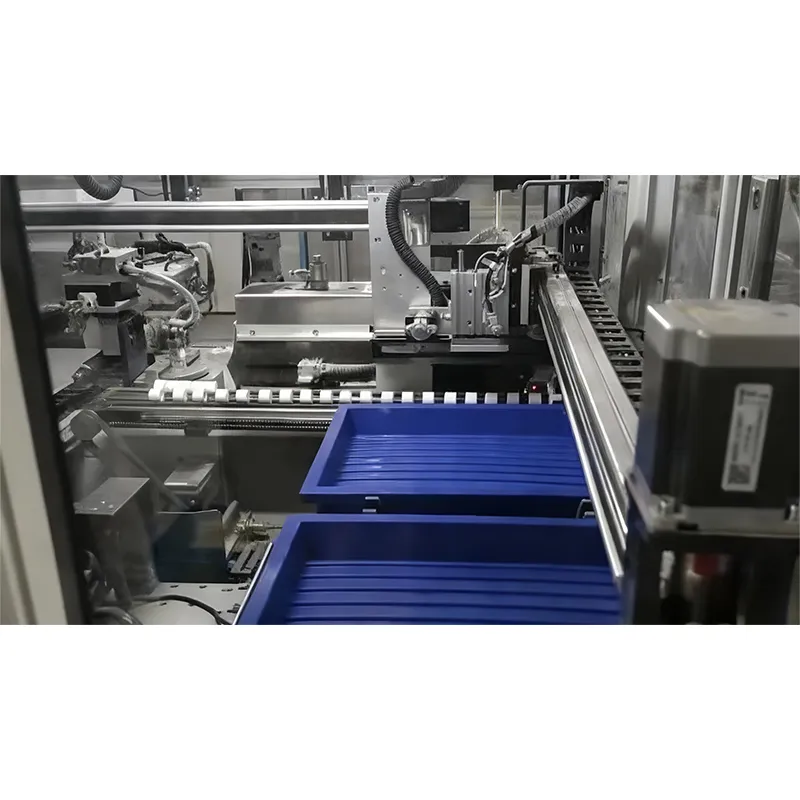
Запомнился случай с линией сборки электронных компонентов, где заказчик требовал точность ±0.01 мм. Использовали редуктор с заявленным люфтом ≤1 угловой минуты. В теории — подходит. На практике же оказалось, что оптический датчик фиксировал микровибрации от редуктора, которые не учитывались в ТЗ. Система позиционирования ?дышала? в диапазоне 0.02 мм, что для клиента было критично. Пришлось дорабатывать крепления и добавлять демпфирующие элементы — ситуация исправилась, но сроки сдвинулись на неделю.
Сейчас при подборе редуктора мы всегда тестируем его в связке с конкретным оптическим датчиком. Даже если производитель заявляет ?идеальную совместимость?. Как показала практика, фазовые искажения от датчика могут усиливаться механическими резонансами редуктора — особенно в системах с частотой позиционирования выше 50 Гц.
Оптический датчик: когда разрешение — не главное
Многие инженеры гонятся за нанометровым разрешением оптических датчиков, забывая про базовые вещи вроде устойчивости к вибрациям или засветке. В одном из наших ранних проектов для https://www.rq-automation.ru использовали датчик с разрешением 5 нм — казалось бы, предел мечтаний. Но в цеху с работающими токарными станками система выдавала погрешность в 20 раз выше расчетной. Причина — банальная вибрация от соседнего оборудования, которую не учли при проектировании.
Сейчас мы всегда рекомендуем клиентам проводить тесты в реальных условиях, а не в лаборатории. Особенно для оборудования с редуктором — механические колебания передаются на оптику, и даже самая совершенная электроника не справится без грамотной механической развязки.
Еще один момент — температурный дрейф. В системах, где требуется повторное позиционирование с точностью до микрона, изменение температуры на 5°C может свести на нет все усилия. Пришлось разрабатывать систему калибровки ?на лету? для датчиков в прецизионных станках — теперь это стандартная опция в наших решениях.
Интеграция: где рождаются настоящие проблемы
Самая частая ошибка — пытаться собрать систему из ?лучших? компонентов без учета их взаимодействия. Мы в ООО Наньцзин Жуцянь Автоматизированное Оборудование прошли через это: взяли немецкий редуктор, японский датчик, американский контроллер. Результат — нестабильная работа из-за разницы в протоколах обмена и временных задержках.
Пришлось разрабатывать собственные адаптеры и прошивки, что увеличило стоимость проекта на 30%. Зато теперь мы понимаем: ключевое — не характеристики отдельных компонентов, а их синергия. Особенно в системах с многократным позиционированием, где задержка в 1 мс может критично повлиять на точность.
Сейчас для серийных решений используем модульный подход — предварительно тестируем связки редуктор-датчик-контроллер в разных режимах. Это позволяет избежать сюрпризов при внедрении и давать клиентам реальные, а не бумажные гарантии по точности.
Практические кейсы: от успехов до провалов
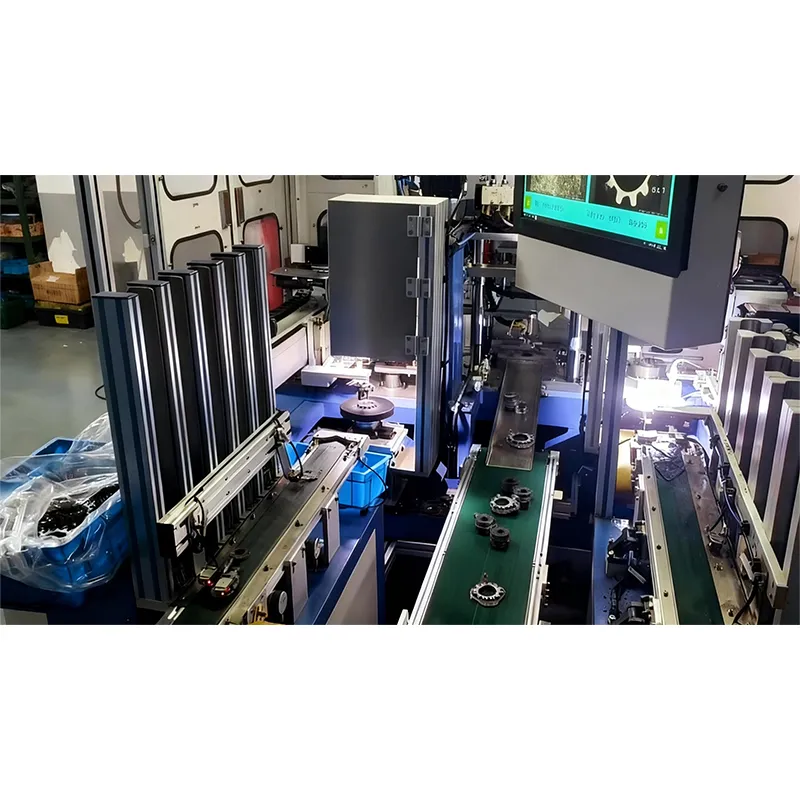
Один из самых показательных проектов — автоматизация линии сборки подшипников для автомобильной промышленности. Заказчик требовал точность позиционирования 0.005 мм при цикле 0.8 секунд. Использовали редуктор с волновой передачей и оптический датчик с интерполяцией. Казалось, все просчитано — но в процессе эксплуатации выяснилось, что эмульсия для охлаждения попадала на оптику, вызывая ложные срабатывания.
Пришлось экранировать датчик и менять систему обдува — проект сдали с задержкой, но клиент остался доволен. Главный вывод: никогда нельзя полагаться только на технические спецификации, реальные условия всегда вносят коррективы.
Был и откровенно провальный проект — система позиционирования для фармацевтического производства. Сэкономили на редукторе, решив, что для ?невысоких нагрузок? подойдет бюджетный вариант. Через три месяца люфт превысил допустимые значения, пришлось полностью менять систему. С тех пор для критичных применений используем только проверенные решения, даже если это увеличивает стоимость.
Перспективы и тренды в оборудовании позиционирования
Сейчас вижу переход на интегрированные системы, где редуктор, датчик и привод проектируются как единое целое. Это позволяет минимизировать проблемы совместимости и повысить надежность. В новых разработках для https://www.rq-automation.ru мы экспериментируем с магнитными редукторами — у них практически нет износа и люфта, но пока высокая стоимость ограничивает применение.
Еще одно направление — адаптивные алгоритмы компенсации погрешностей. Вместо того чтобы гнаться за идеальной механикой, можно программно корректировать неточности на основе данных с датчиков. Это особенно актуально для оборудования с оптическим датчиком, где можно в реальном времени учитывать температурные деформации и механический износ.
Из последнего интересного — системы с ИИ-предсказанием износа. На основе анализа данных с датчиков можно прогнозировать, когда редуктор или оптика потребуют обслуживания. Пока это пилотные проекты, но для ответственных применений в аэрокосмической или медицинской отраслях такие решения уже тестируем.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Ориентационная машина для постоянных магнитных колец
Ориентационная машина для постоянных магнитных колец -
 Оборудование для загрузки и разгрузки при правке в порошковой металлургии
Оборудование для загрузки и разгрузки при правке в порошковой металлургии -
 Автоматическая загрузка и разгрузка печи для порошковой металлургии
Автоматическая загрузка и разгрузка печи для порошковой металлургии -
 Ориентационная машина для промышленной керамики
Ориентационная машина для промышленной керамики -
 Маркировка торца шестерен
Маркировка торца шестерен -
 Ориентационная машина для порошковой металлургии
Ориентационная машина для порошковой металлургии -
 Сборочная машина для лебедки транспортного средства
Сборочная машина для лебедки транспортного средства -
 Калибр-пробка для шестерен
Калибр-пробка для шестерен -
 Многофункциональная интегрированная ориентационная машина
Многофункциональная интегрированная ориентационная машина -
 Ориентационная машина для керамических фильтров
Ориентационная машина для керамических фильтров -
 Сборочная линия электронной промышленности
Сборочная линия электронной промышленности -
.webp) Производственная линия порошковой металлургии
Производственная линия порошковой металлургии
Связанный поиск
Связанный поиск- Оборудование для автоматизации машиностроения
- Интеграция mes и промышленного интернета вещей
- Полная интеграция автоматизации линий с agv/amr для складской логистики
- Оборудование для aoi контроля на сборочной линии электронной промышленности
- Робот для логистического паллетирования
- Автоматизированное контрольно-измерительное оборудование с высокой точностью повторного позиционирования
- Цилиндры для гаража электрический
- Оборудование для ai обработки изображений с подбором промышленной камеры
- Сборочная машина для лебедки транспортного средства
- Высокоточное автоматизированное оборудование с энкодером для контрольно-измерительной машины калибром-пробкой шестерен



