
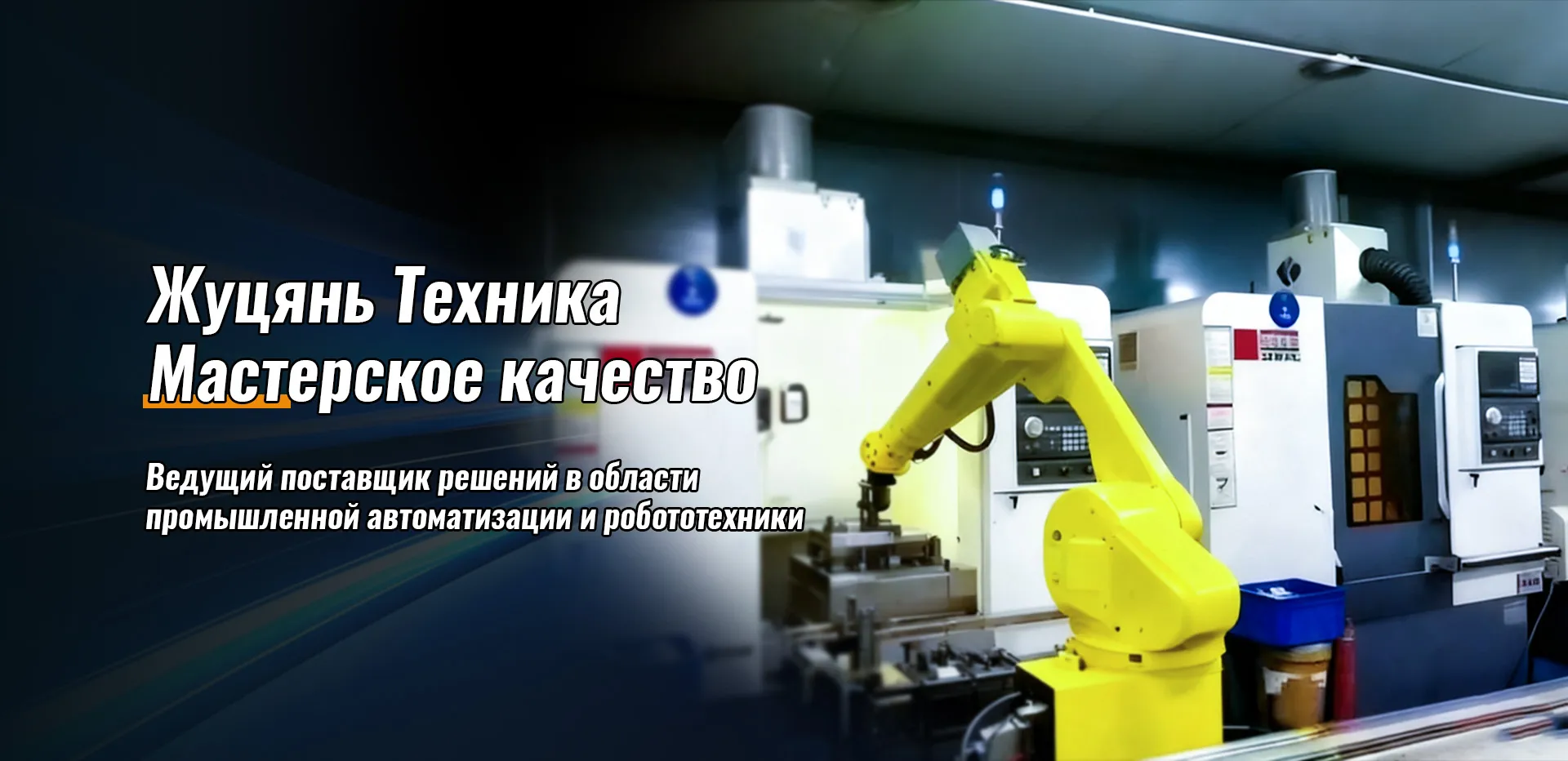
Применение промышленного интернета вещей для шестиосевой роботизированной загрузки и разгрузки
Когда говорят про IIoT в роботизированных системах, многие сразу представляют умные графики на дашбордах. Но на практике всё упирается в синхронизацию механики и данных в реальном времени — особенно для шестиосевых манипуляторов, где каждый градус поворота влияет на точность позиционирования.
Ошибки внедрения: от датчиков до облака
В 2022 году мы столкнулись с парадоксом: на тестовом стенде промышленный интернет вещей показывал идеальные данные, но при интеграции в линию разгрузки станков ЧПУ робот KUKA KR 120 R2830 mt давал погрешность в 3-5 мм. Оказалось, проблемы были не в ПО, а в физике — вибрации от конвейера создавали шумы в аналоговых сигналах датчиков. Пришлось перекладывать кабельные трассы и ставить ферритовые кольца, о которых в учебниках по IIoT не пишут.
Ещё один нюанс — люди недооценивают latency при работе с облачными платформами. Для операций типа ?захват-перенос-укладка? задержка даже в 200 мс критична. Мы перешли на гибридную схему: предварительные расчёты траекторий на Edge-устройствах от Siemens, а в облако уходят только данные для предиктивного обслуживания. Кстати, именно тогда начали сотрудничать с ООО Наньцзин Жуцянь Автоматизированное Оборудование — их инженеры предложили использовать компактные шлюзы Profinet-to-MQTT, которые не требовали перепрошивки контроллеров робота.
Кстати, про шестиосевую роботизированную загрузку — многие думают, что главное это динамические модели. Но на деле чаще всего ?вылетает? калибровка инструмента. Мы разработали процедуру авто-калибровки через IIoT: робот делает серию тестовых хватов, а тензометрические датчики в схвате корректируют параметры в реальном времени. Без этого даже идеальная сеть не спасает.
Реальные кейсы: от склада до цеха
На проекте для завода автокомпонентов под Казанью мы объединили два роботизированных манипулятора Fanuc M-710ic/50 в единую IIoT-сеть. Сложность была в нестабильном освещении — стандартные системы технического зрения давали сбои. Решение нашли через совмещение данных: RFID-метки на паллетах + ультразвуковые сенсоры определения дистанции. Данные с них шли в единую платформу PTC ThingWorx, где алгоритм компенсировал погрешности.
Интересный момент обнаружили при анализе отказов: чаще всего ломались не моторы или редукторы, а пневматические захваты. Внедрили датчики давления SMC с передачей данных по OPC UA — теперь система предупреждает о падении давления за 2-3 часа до критического значения. Это тот случай, когда промышленный интернет вещей экономит не только время, но и запчасти.
Команда ООО Наньцзин Жуцянь здесь предложили нестандартное решение — использовать вибродатчики на основаниях роботов. Казалось бы, при чём тут разгрузка? Но оказалось, что износ шариковых винтов можно предсказать по изменению спектра вибраций при разгоне манипулятора. Теперь это стало частью нашего стандартного мониторинга.
Подводные камни связи
Беспроводные технологии в цеху — всегда лотерея. Пытались использовать Wi-Fi 6 для передачи телеметрии от шестиосевых роботов — в теории отлично, на практике помехи от инверторов сварочных роботов глушили канал. Перешли на проводной EtherCAT, но и там нашлись нюансы: при длине линии больше 80 метров начинались потери пакетов. Пришлось ставить дополнительные хабы с фильтрацией EMI.
Протоколы — отдельная головная боль. OPC UA хорош для верхнего уровня, но для реального времени нужен какой-то вариант с детерминированностью. Сейчас тестируем комбинацию MQTT + TSN (Time-Sensitive Networking) на оборудовании от Beckhoff. Пока стабильность на 97% — лучше, чем было, но ещё есть куда расти.
Кстати, про интеграцию — когда подключали систему мониторинга к роботам ABB, столкнулись с тем, что их контроллеры IRC5 по умолчанию блокируют внешние запросы. Пришлось вручную править конфигурационные файлы и настраивать белый список IP. Мелочь, а без неё весь промышленный интернет вещей просто не работает.
Экономика и эффективность
Многие заказчики просят ?доказать окупаемость IIoT?. Цифры такие: на линии разгрузки литьевых машин после внедрения удалось сократить простои на 18% — в основном за счёт предиктивного обслуживания подшипниковых узлов. Но неожиданный эффект получили в энергопотреблении — оптимизация траекторий движения через анализ данных снизила пиковые нагрузки на 18-22%.
Важный момент: не стоит пытаться оцифровать всё сразу. Мы начинали с 3 ключевых параметров (температура редукторов, вибрация осей, точность позиционирования), потом постепенно добавляли мониторинг электропитания и состояния смазки. Такой поэтапный подход позволяет искать узкие места без перегрузки инфраструктуры.
В проектах с Наньцзин Жуцянь часто используем их разработку — компактные модули сбора данных с поддержкой IEC 61131-3. Особенно удобно для модернизации старых линий, где нельзя менять штатные контроллеры. Кстати, они же подсказали трюк с использованием резервных аналоговых входов ПЛК для подключения дополнительных датчиков — экономия на аппаратной части до 40%.
Перспективы и ограничения
Сейчас экспериментируем с цифровыми двойниками для роботизированной загрузки — не те красивые 3D-модели, а реальные физические модели с учётом люфтов и температурных деформаций. Пока удаётся предсказывать износ зубчатых передач с точностью до 120 часов наработки. Но есть проблема — для точных моделей нужны детальные техпаспорта оборудования, а производители часто их не предоставляют.
Ещё один тренд — использование AI для компенсации износа. Обучаем нейросеть распознавать микро-отклонения в траекториях захвата. Пока результаты обнадёживающие: на тестах удаётся продлить межсервисный интервал на 15-20%. Но требует значительных вычислительных ресурсов — пока запускаем только в ночные смены, когда нагрузка на сеть ниже.
Если говорить о будущем — главным вызовом вижу стандартизацию. Сейчас каждый производитель роботов тянет одеяло на себя: у KUKA свой протокол, у Fanuc свой, у Yaskawa свой. Без единого стандарта на обмен данными настоящий промышленный интернет вещей для робототехники будет оставаться набором костылей и переходников. Но судя по активности в OPC Foundation, лет через пять может что-то сдвинуться.
Соответствующая продукция
Соответствующая продукция

Самые продаваемые продукты
Самые продаваемые продукты-
 Автоматическая загрузка и разгрузка печи для порошковой металлургии
Автоматическая загрузка и разгрузка печи для порошковой металлургии -
 Ориентационная машина-2
Ориентационная машина-2 -
.webp) Производственная линия порошковой металлургии
Производственная линия порошковой металлургии -
 Многофункциональная интегрированная ориентационная машина
Многофункциональная интегрированная ориентационная машина -
 Машина для контроля конусности
Машина для контроля конусности -
 Маркировка торца шестерен
Маркировка торца шестерен -
 Специализированная сборочная машина
Специализированная сборочная машина -
 Ориентационная машина для твердых сплавов
Ориентационная машина для твердых сплавов -
 Сборочная машина для лебедки транспортного средства
Сборочная машина для лебедки транспортного средства -
 Портальная загрузка и разгрузка для ЧПУ
Портальная загрузка и разгрузка для ЧПУ -
 Загрузка и разгрузка в штамповочной отрасли
Загрузка и разгрузка в штамповочной отрасли -
 Роботизированная загрузка и разгрузка для ЧПУ
Роботизированная загрузка и разгрузка для ЧПУ
Связанный поиск
Связанный поиск- Оборудование на базе промышленного интернета вещей для автоматизации печей магнитных материалов
- Система машинного зрения
- Нестандартное оборудование для загрузки и разгрузки при правке с пневмоизмерением
- Интеграция mes и промышленного интернета вещей
- Индуктивные датчики приближения
- Промышленный планшет с сенсорным экраном и чпу системой
- Автоматическое оборудование для отрасли магнитных материалов
- Интеллектуальная система загрузки и разгрузки печей
- Решение на базе промышленного интернета вещей для прогнозирующего обслуживания автоматического оборудования
- Оборудование для автоматического контроля с гибкой подачей в электронной сборке



