
Применение шестиосевого робота для сварочной загрузки и разгрузки
Если честно, когда впервые услышал про применение шестиосевого робота для сварочной загрузки-разгрузки, думал — очередная попытка впихнуть дорогую игрушку туда, где справятся два рабочих с тележкой. Но на деле оказалось, что в некоторых конфигурациях без этого уже просто не обойтись — особенно когда речь идёт о серийном производстве с жёсткими допусками.
Почему именно шестиосевые роботы
Начну с того, что многие до сих пор путают задачи простой механизации и полноценной роботизации. Вот типичный случай: заказчик просит ?автоматизировать подачу деталей в сварочную зону?, а по факту ему нужен не конвейер с датчиками, а именно шестиосевой робот — потому что геометрия изделий меняется каждые два месяца, и перепрограммировать позиционеры проще, чем перестраивать жёсткую оснастку.
Коллеги из ООО Наньцзин Жуцянь Автоматизированное Оборудование как-то показывали статистику по своим проектам — у них больше 60% заказов на роботизированную сварку изначально поступали с запросом на ?автоподатчики?, а в итоге технологи упирались в необходимость использовать именно шестистепенные манипуляторы. Не потому что модно, а потому что трёхосевые системы не дают того манёвра при позиционировании сложных отливок.
Заметил ещё такую деталь: если в системе используется один робот и для загрузки, и для разгрузки, и для сварки — это кажется экономным решением, но на практике часто выходит наоборот. Время цикла увеличивается, плюс риски поломки вырастают кратно. Гораздо надёжнее, когда сварочная загрузка и разгрузка распределены между разными модулями, пусть это и дороже в сборке.
Ошибки при интеграции
Самая частая проблема — недооценка необходимости калибровки. Ставим робота, настраиваем по чертежам, а потом оказывается, что реальные детали имеют отклонения в пару миллиметров — и всё, прижимные устройства не срабатывают как надо. Приходится допиливать систему визирования или ставить дополнительные датчики.
Один раз наблюдал, как на заводе в Подмосковье пытались использовать стандартный шестиосевой манипулятор для загрузки длинномерных профилей — вроде бы KUKA KR 60, кажется. Так вот, когда профиль длиной 6 метров подаётся под углом, возникает такой паразитный момент, что робот просто не может удержать траекторию — пришлось переделывать всю кинематику и ставить промежуточные опоры.
Кстати, про сварочную разгрузку — тут многие забывают про температурную деформацию. Грели деталь, сварили, робот хватает её сразу после завершения шва — а она уже изменила геометрию. В итоге позиционирование на выходе сбивается. Приходится либо выдерживать паузу, либо закладывать компенсацию в программу.
Пример удачного решения от RQ Automation
На их сайте https://www.rq-automation.ru есть кейс по автоматизации сварочного участка для каркасов грузовых автомобилей — там как раз использовалась связка из двух шестиосевых роботов. Один занимался загрузкой заготовок и перестановкой их между позициями, второй — собственно сваркой. Система показала себя устойчивой даже при работе с деталями разной толщины.
Что мне понравилось в их подходе — они не стали унифицировать захваты, а сделали сменные адаптеры под каждую группу изделий. Да, первоначальные затраты выше, но зато при смене модели кузова переналадка занимает не неделю, а несколько часов. Это тот случай, когда применение шестиосевого робота действительно оправдано экономически.
Кстати, они там используют систему двойного позиционирования — сначала грубо по конвейеру, потом точно по лазерным меткам. Уменьшило количество брака процентов на 15, по их отчётам.
Что не сработало в наших проектах
Пытались как-то использовать универсальные схваты с вакуумными присосками для листовых деталей — в теории всё красиво, на практике оказалось, что после сварки поверхность становится неровной, и вакуум постоянно срывается. Перешли на механические захваты с регулируемым усилием.
Ещё был неприятный опыт с системой охлаждения — когда робот работает в режиме загрузки-сварки-разгрузки без перерыва, перегревается редуктор пятой оси. Пришлось ставить дополнительное воздушное охлаждение, хотя по паспорту оно не требовалось.
Самое обидное — когда заказчик экономит на мелочах. Поставили дорогого Fanuc, а датчики взяли no-name — и вся точность позиционирования накрылась. Теперь всегда настаиваем на комплектной поставке от одного производителя.
Перспективы развития
Сейчас активно экспериментируем с гибкими производственными ячейками, где один шестиосевой робот обслуживает несколько сварочных постов. Пока что получается снизить простои на 20-30%, но есть сложности с синхронизацией потоков.
Вижу потенциал в совмещении функций — например, когда робот после разгрузки выполняет зачистку швов. Но это требует совсем других допусков по точности и более сложного программирования.
Из интересного — начинаем тестировать систему с обратной связью по силе сжатия для сварочной загрузки хрупких деталей. Пока сыровато, но в перспективе может решить проблему деформации тонкостенных конструкций.
Выводы для практиков
Главный урок — не стоит воспринимать робота как панацею. Да, для серийного производства с постоянной номенклатурой применение шестиосевого робота даёт очевидный выигрыш. Но если у вас мелкосерийное производство с постоянными переналадками — считайте каждый раз, стоит ли овчинка выделки.
Обязательно закладывайте в бюджет не только оборудование, но и оснастку, и ПО, и обучение персонала. Как показывает практика RQ Automation, именно на этих статьях чаще всего экономят, а потом месяцами не могут выйти на плановые показатели.
И последнее — всегда оставляйте запас по грузоподъёмности. Лучше взять робота на 60 кг для работы с 40-килограммовыми деталями, чем пытаться выжать максимум из слабой модели. Надёжность в этом деле важнее сиюминутной экономии.
Соответствующая продукция
Соответствующая продукция

Самые продаваемые продукты
Самые продаваемые продукты-
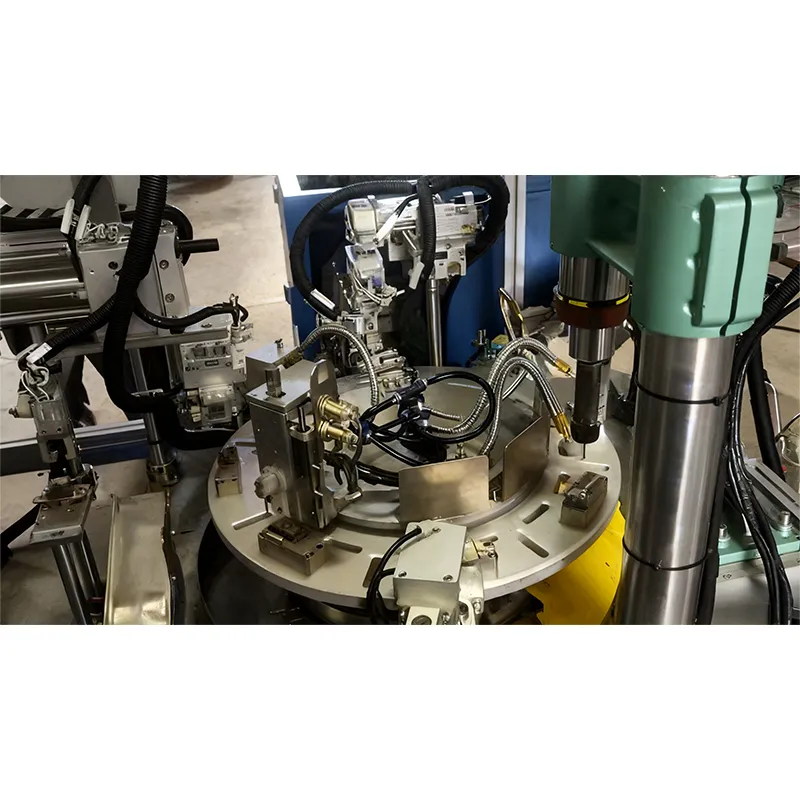
 Ориентационная машина для твердых сплавов
Ориентационная машина для твердых сплавов -
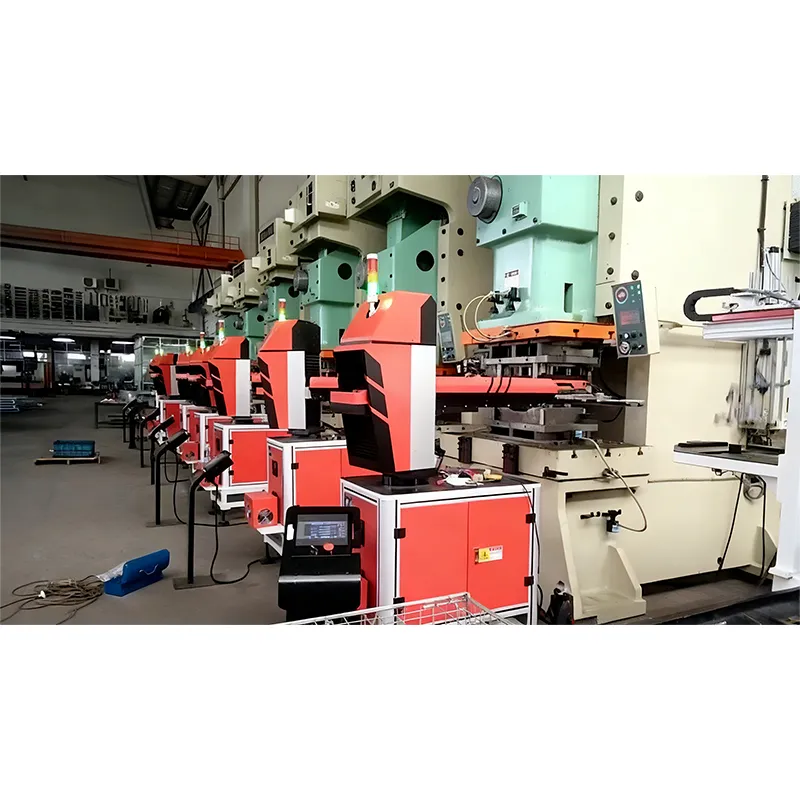 Загрузка и разгрузка в штамповочной отрасли
Загрузка и разгрузка в штамповочной отрасли -
 Машина для контроля конусности
Машина для контроля конусности -
 Специализированная сборочная машина
Специализированная сборочная машина -
 Ориентационная машина для порошковой металлургии
Ориентационная машина для порошковой металлургии -
 Ориентационная машина-2
Ориентационная машина-2 -
 Роботизированная загрузка и разгрузка для ЧПУ
Роботизированная загрузка и разгрузка для ЧПУ -
.webp) Производственная линия порошковой металлургии
Производственная линия порошковой металлургии -
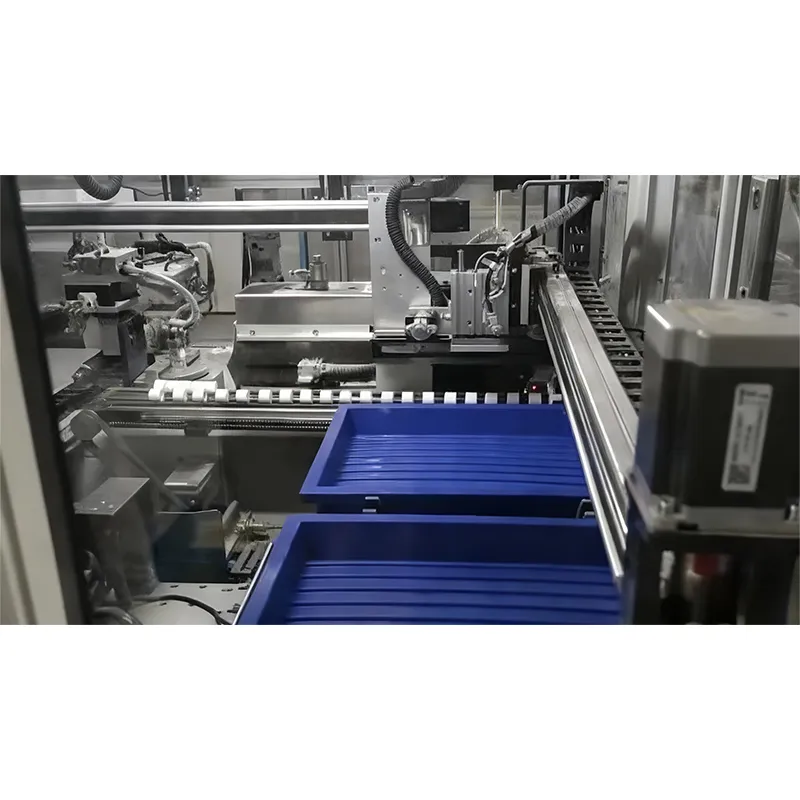
 Сборочная линия электронной промышленности
Сборочная линия электронной промышленности -
 Маркировка торца шестерен
Маркировка торца шестерен -
 Ориентационная машина для промышленной керамики
Ориентационная машина для промышленной керамики -
 Ориентационная машина для постоянных магнитных колец
Ориентационная машина для постоянных магнитных колец
Связанный поиск
Связанный поиск- Компания по планированию интеллектуальных заводов под ключ
- Решение для автоматической загрузки и разгрузки при правке твердых сплавов
- Частотные преобразователи
- Цилиндры для гаража электрический
- Оборудование для визуального контроля медицинской и фармацевтической продукции
- Шестиосевой промышленный робот
- Автоматическая ориентационная машина для ферритовых колец
- Оптические защитные ограждения световые завесы
- Промышленный iot анализ больших данных для прогнозирующего обслуживания
- Полная интеграция автоматизации линий с agv/amr для складской логистики



