
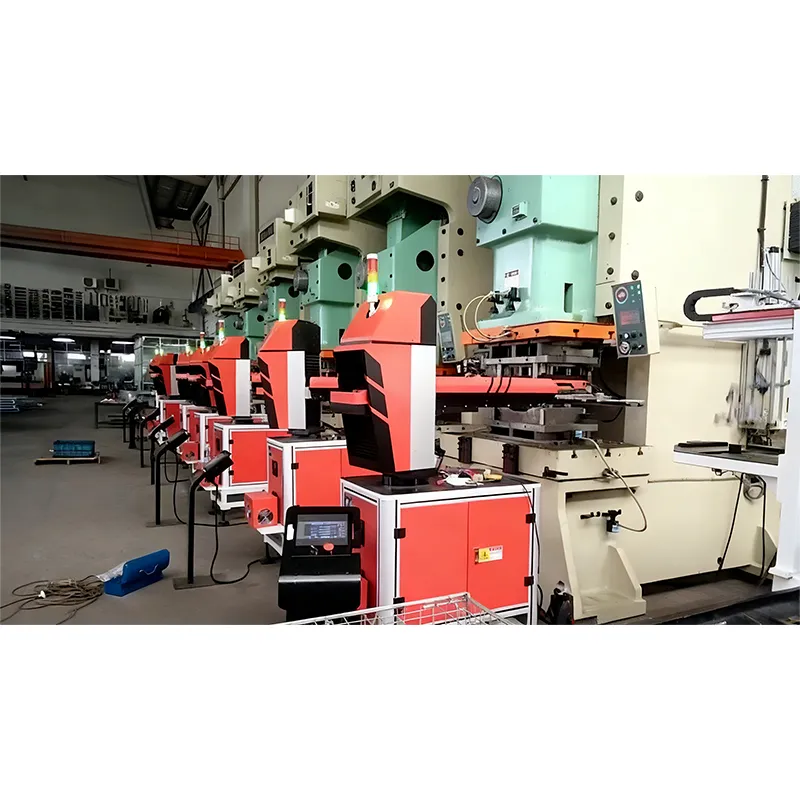
Роботы для автоматической сварки/транспортировки в автомобилестроении
Если честно, когда слышишь про роботы для автоматической сварки в автостроении, первое, что приходит в голову — это идеальные видео с конвейеров, где манипуляторы танцуют в синхронном балете. Но на практике всё чаще сталкиваешься с тем, что даже продвинутые системы вроде KUKA KR QUANTEC или FANUC Arc Mate не всегда справляются с разнотолщинными кузовными панелями, особенно когда речь идёт о переходе на новые модели. Вот где начинается настоящая работа, а не картинка для презентаций.
Опыт внедрения и подводные камни
Помню, как в 2019 году мы запускали линию для сварки боковин кузова на одном из заводов в Татарстане. Использовали роботы Yaskawa с системой адаптивного слежения, но столкнулись с деформацией металла после точечной сварки — пришлось вносить коррективы в траектории прямо на ходу, почти интуитивно. Это та самая ситуация, когда теория расходится с практикой: даже точные расчёты не учитывают микровибрации от конвейера или температурные колебания в цеху.
Что касается транспортировки в автомобилестроении, тут часто переоценивают роль AGV-тележек. Да, они модные и технологичные, но на том же проекте мы видели, как паллетирование кузовов на промежуточных участках вызывало задержки — роботы-сварщики простаивали, пока операторы вручную выравнивали позиции. Пришлось дополнять систему оптическими датчиками Sick для корректировки позиционирования, что изначально не планировали.
Кстати, о компаниях, которые понимают такие нюансы: например, ООО Наньцзин Жуцянь Автоматизированное Оборудование (https://www.rq-automation.ru) — их подход к проектированию линий часто учитывает подобные ?неидеальности? производства. Они не просто ставят роботов, а анализируют, как те же манипуляторы будут вести себя при сварке алюминиевых сплавов, где тепловложение критично.
Проблемы калибровки и метрологии
Многие недооценивают, как влияет на автоматическую сварку банальная калибровка инструментов. На том же татарстанском проекте мы трижды переделывали калибровочные мишени для системы Vision — оказалось, что освещение в цеху меняется в зависимости от времени суток, и это давало погрешность до 1.5 мм. Для кузовных элементов это уже критично, особенно в зонах нахлёста панелей.
Ещё один момент — совместимость программных сред. Часто роботы от разных производителей используют свои протоколы, и стыковка, скажем, сварщика с транспортировочной системой требует написания кастомных драйверов. Мы как-то потратили две недели на интеграцию Kawasaki и Omron — проблема была в задержках передачи данных по Ethernet/IP.
Здесь полезно смотреть на компании с опытом комплексных решений. Те же из ООО Наньцзин Жуцянь Автоматизированное Оборудование (https://www.rq-automation.ru) в своём профиле указывают не просто производство, а полный цикл — от проектирования до интеграции. Это важно, потому что без понимания, как робот поведёт себя в связке с конвейером, даже самая дорогая техника будет работать на половину мощности.
Особенности работы с тонкостенными конструкциями
В современных автомобилях всё чаще используют тонкостенные профили для облегчения кузова. И если для транспортировки это не так критично, то для сварки — настоящая головная боль. Деформации от перегрева, особенно в зонах с геометрически сложными швами, требуют не только точного контроля тока, но и предварительного моделирования тепловых полей. Мы как-то применяли для этого ПО от ESAB, но пришлось дополнять его собственными наработками — стандартные алгоритмы не учитывали локальные напряжения в зонах крепления усилителей.
Интересно, что некоторые интеграторы, включая упомянутую ООО Наньцзин Жуцянь Автоматизированное Оборудование, сейчас экспериментируют с гибридными подходами — например, комбинируют лазерную сварку с роботизированной MIG/MAG для снижения тепловложения. Но это пока дорогое удовольствие, и не каждый завод готов к таким инвестициям.
Кстати, о стоимости — многие забывают, что экономия на системе охлаждения горелок может вылиться в частые простои. Мы на одном из проектов в Ульяновске научились на собственном опыте: ставили бюджетные варианты, а потом каждые три месяца меняли контактные наконечники из-за перегрева.
Интеграция с устаревшим оборудованием
Частая проблема на российских заводах — необходимость стыковки новых роботов для автоматической сварки с линиями, которым по 20-30 лет. Здесь уже речь не о идеальной автоматизации, а о том, как адаптировать системы под реальные условия. Например, мы как-то модернизировали участок сварки на КамАЗе, где пришлось сохранять старые конвейерные ролики — их биение компенсировали через дополнительный сервопривод с обратной связью.
В таких случаях полезно обращаться к компаниям, которые специализируются на кастомизации. Например, ООО Наньцзин Жуцянь Автоматизированное Оборудование в своей работе часто акцентирует гибкость решений — их инженеры умеют адаптировать стандартные модули под конкретные производственные условия, что для старых цехов бывает важнее, чем топовые характеристики.
Кстати, о программной части — при интеграции со старыми ЧПУ иногда проще написать новый интерфейс, чем пытаться подружить протоколы. Мы в таких случаях используем шлюзы на базе Raspberry Pi — дешёво, но требует глубокой настройки.
Перспективы и ограничения
Если говорить о будущем, то автоматическая сварка в автомобилестроении явно движется к более гибким системам. Но гибкость — это не только про программируемые траектории, но и про возможность быстро перенастраивать линии под новые модели. Сейчас, например, пробуем внедрять системы на базе ИИ для предсказания деформаций — пока результаты нестабильные, но для мелкосерийного производства уже полезно.
Что касается транспортировки, то здесь тренд — это минимизация ручных операций между этапами. Но опять же, идеальная картинка из каталогов разбивается о реальность: например, магнитные направляющие для AGV требуют идеально ровного пола, а в старых цехах его просто нет.
В целом, если оценивать рынок, то компании вроде ООО Наньцзин Жуцянь Автоматизированное Оборудование (https://www.rq-automation.ru) — их подход к проектированию комплексных линий — это как раз попытка учесть эти нюансы. Не просто продать робота, а сделать так, чтобы он работал в условиях конкретного завода, с его уникальными проблемами и ограничениями. И это, пожалуй, главное в нашей работе — не идеальная теория, а умение адаптироваться под реальность.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
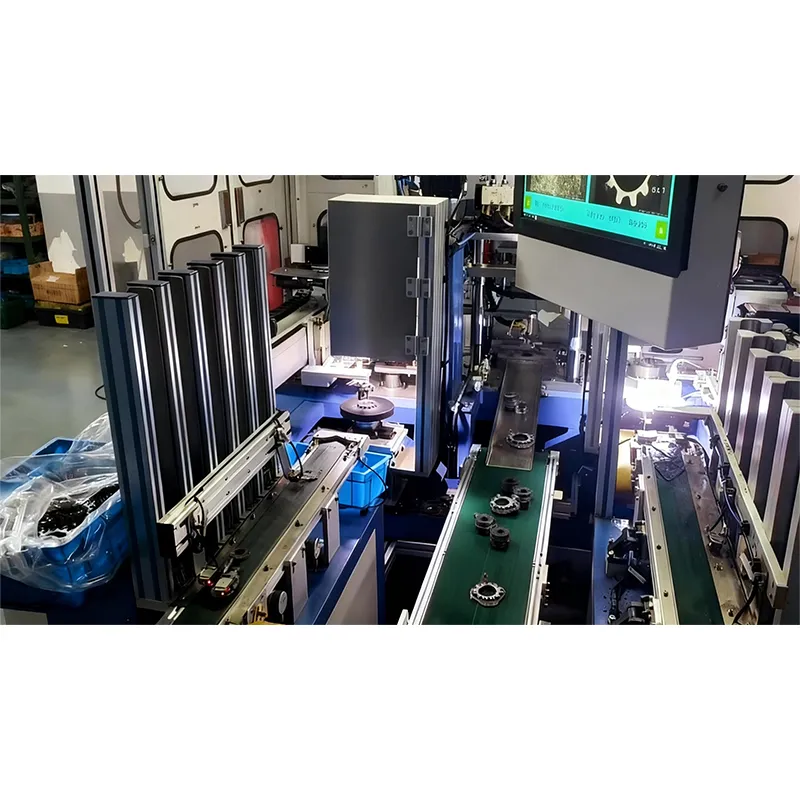
 Загрузка и разгрузка в штамповочной отрасли
Загрузка и разгрузка в штамповочной отрасли -
 Роботизированная загрузка и разгрузка для ЧПУ
Роботизированная загрузка и разгрузка для ЧПУ -
 Ориентационная машина-2
Ориентационная машина-2 -
 Портальная загрузка и разгрузка для ЧПУ
Портальная загрузка и разгрузка для ЧПУ -
.webp) Производственная линия порошковой металлургии
Производственная линия порошковой металлургии -
 Сборочная машина для лебедки транспортного средства
Сборочная машина для лебедки транспортного средства -
 Калибр-пробка для шестерен
Калибр-пробка для шестерен -
 Ориентационная машина для промышленной керамики
Ориентационная машина для промышленной керамики -
 Оборудование для загрузки и разгрузки при правке в порошковой металлургии
Оборудование для загрузки и разгрузки при правке в порошковой металлургии -
 Многофункциональная интегрированная ориентационная машина
Многофункциональная интегрированная ориентационная машина -
 Машина для контроля конусности
Машина для контроля конусности -
 Маркировка торца шестерен
Маркировка торца шестерен
Связанный поиск
Связанный поиск- Системный интегратор роботизированных систем
- Применение шестиосевого робота для сварочной загрузки и разгрузки
- Оптические датчики
- Электрический гидравлический цилиндр
- Оборудование для автоматической загрузки и разгрузки в ковке
- Электрические цилиндры
- Оборудование для прецизионной сборки с винтовым суппортом и направляющими
- Шестиосевой промышленный робот
- Автоматизированное оборудование с ocr визуальным позиционированием для промышленной керамики
- Направляющие



