
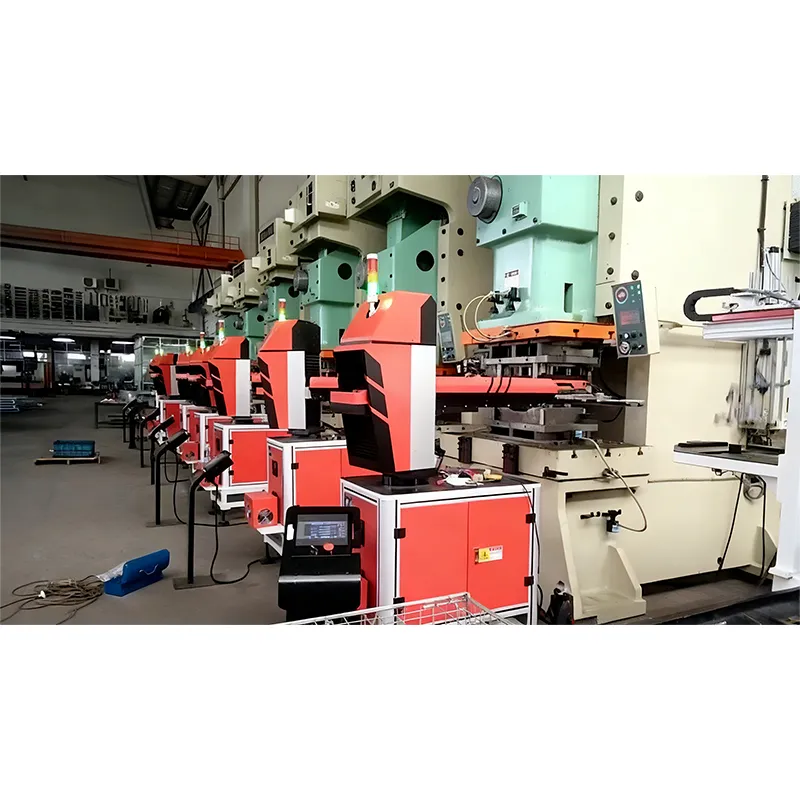
Четырехосевой промышленный робот
Когда слышишь 'четырехосевой промышленный робот', первое, что приходит в голову - ограниченная подвижность. Но на практике эти системы часто превосходят шестиосевые аналоги в задачах, где не нужна пространственная ориентация инструмента. В нашей работе с ООО Наньцзин Жуцянь Автоматизированное Оборудование мы не раз сталкивались с ситуациями, когда заказчики требовали шести степеней свободы, хотя техническое задание идеально ложилось на конфигурацию 4-осевого робота.
Конструкционные особенности, которые не пишут в спецификациях
Основное заблуждение - считать четвертую ось простым дополнением к трехосевой системе. В реальности это комплексная переработка кинематики. Например, в наших линиях для штамповки мы используем четырехосевой промышленный робот с вынесенным редуктором на четвертой оси - решение, которое увеличило ресурс работы на 30% compared to стандартными конструкциями.
Мало кто учитывает температурное расширение в четвертой оси. На проекте для литья под давлением мы столкнулись с отклонениями позиционирования в 0.3 мм после 8 часов непрерывной работы. Пришлось пересчитывать компенсации для всего кинематического контура.
Интересный момент с балансировкой - добавление четвертой оси кардинально меняет распределение масс. В early prototypes мы недооценили этот фактор, что привело к вибрациям на скоростях выше 60% от номинальных. Решение нашли через асимметричное расположение контргрузов.
Практические кейсы интеграции
На сайте https://www.rq-automation.ru мы описываем базовые сценарии, но в реальности каждый проект требует адаптации. Например, для автоматизации подачи заготовок в ЧПУ мы использовали четырехосевой промышленный робот с модифицированным ПО - добавили алгоритм предварительного расчета траектории с учетом инерции поворотного узла.
Особенно показательным был проект для пищевой отрасли - там пришлось полностью переработать конструкцию четвертой оси под требования гигиенических стандартов. Уплотнения, материалы, даже тип смазки - все отличалось от промышленного исполнения.
Кстати, о грузоподъемности - в спецификациях обычно указывают максимальную нагрузку на запястье, но редко уточняют, как она распределяется по осям. Мы разработали внутреннюю методику тестирования, которая показывает реальные возможности робота при работе с нестандартными центрами масс.
Типичные ошибки при проектировании рабочих зон
Самая распространенная ошибка - неучет габаритов робота в крайних положениях четвертой оси. В одном из первых наших проектов столкнулись с тем, что робот задевал периферийное оборудование при повороте на 190 градусов. Пришлось пересматривать компоновку всей ячейки.
Еще момент - расположение кабелей и пневмолиний. Для четырехосевой промышленный робот с непрерывным вращением четвертой оси это критично. Мы отработали несколько схем кабельных цепей, пока не нашли оптимальный вариант с двойной петлей.
Часто забывают про зоны обслуживания. В проекте для литейного производства мы изначально не предусмотрели достаточный доступ к редуктору четвертой оси - в итоге плановое ТО занимало втрое больше времени.
Программные нюансы и тонкости настройки
Многие системы программирования не учитывают специфику кинематики 4-осевых роботов. Мы в ООО Наньцзин Жуцянь Автоматизированное Оборудование разработали собственные макросы для упрощения калибровки нулевых положений.
Интересная особенность - работа с обратными решениями кинематики. Для некоторых конфигураций четырехосевой промышленный робот может иметь до 4 различных решений обратной кинематики. В наших системах мы реализовали алгоритм автоматического выбора оптимального варианта.
Отдельная тема - компенсация люфтов. Со временем в передачах четвертой оси появляются зазоры. Мы внедрили систему автоматической коррекции на основе датчиков обратной связи, что позволило сохранять точность позиционирования даже после 20 000 часов наработки.
Перспективы и ограничения технологии
Сейчас мы тестируем новую концепцию - четырехосевой промышленный робот с активной компенсацией вибраций. Это особенно актуально для задач высокоскоростной паллетизации, где динамические нагрузки снижают точность.
Но есть и объективные ограничения - например, для задач сварки сложных пространственных швов 4 оси действительно недостаточно. Хотя для 80% применений в механообработке и транспортировке грузов этого более чем достаточно.
На ближайшие годы мы видим потенциал в развитии систем коллаборативной работы на базе 4-осевых роботов. Упрощенная кинематика делает их более безопасными и предсказуемыми при взаимодействии с человеком-оператором.
Соответствующая продукция
Соответствующая продукция

Самые продаваемые продукты
Самые продаваемые продукты-
 Роботизированная загрузка и разгрузка для ЧПУ
Роботизированная загрузка и разгрузка для ЧПУ -
 Полуавтоматическая ориентационная машина
Полуавтоматическая ориентационная машина -
 Маркировка торца шестерен
Маркировка торца шестерен -
 Загрузка и разгрузка в штамповочной отрасли
Загрузка и разгрузка в штамповочной отрасли -
 Оборудование для загрузки и разгрузки при правке в порошковой металлургии
Оборудование для загрузки и разгрузки при правке в порошковой металлургии -
.webp) Производственная линия порошковой металлургии
Производственная линия порошковой металлургии -
 Сборочная линия электронной промышленности
Сборочная линия электронной промышленности -
 Многофункциональная интегрированная ориентационная машина
Многофункциональная интегрированная ориентационная машина -
 Сборочная машина для лебедки транспортного средства
Сборочная машина для лебедки транспортного средства -
 Ориентационная машина для твердых сплавов
Ориентационная машина для твердых сплавов -
 Калибр-пробка для шестерен
Калибр-пробка для шестерен -
 Портальная загрузка и разгрузка для ЧПУ
Портальная загрузка и разгрузка для ЧПУ
Связанный поиск
Связанный поиск- Автоматизация для твердых сплавов
- Стоимость автоматизированного оборудования с гибкой подачей для ориентационной машины постоянных магнитных колец
- Интеллектуальная сборочная линия для лебедок транспортных средств
- Автоматизированная сборочная линия
- Интеллектуальное складское решение с amr
- Agv паллетирующие/депаллетирующие машины для литий-ионных аккумуляторов
- Интеграция и применение машинного зрения
- Автоматическая сортировка по размеру и внешнему виду
- Блок автоматического управления с промышленным компьютером и микроконтроллером
- Электрический тормозной цилиндр



